Robot-pies to czworonożny robot, będący rodzajem robota na nogach, wyglądem podobnym do czworonożnego zwierzęcia. Potrafi chodzić samodzielnie i ma cechy biologiczne. Może chodzić w różnych środowiskach geograficznych i wykonywać różnorodne złożone ruchy. Pies-robot ma wewnętrzny komputer, który może dostosować swoją postawę do zmian w otoczeniu. Może samodzielnie podążać prostą, zaprogramowaną trasą lub być sterowany zdalnie. Pies-robot został opisany jako „najbardziej zaawansowany robot na świecie przystosowany do nierównego terenu”.
Wraz z rozwojem technologii psy-roboty zaczęto wykorzystywać w wielu dziedzinach, od wojska, przez przemysł, po opiekę rodzinną itp., a interakcja między psami-robotami a ludźmi stale rośnie i postępuje. Psy-roboty świadczą usługi w takich obszarach, jak służba, poszukiwania i ratownictwo oraz dostawy.
W elastycznym wnętrzu psa-robota kluczowym elementem jest silnik nóg. Każdy staw kończyn psa robota musi być napędzany przez silnik, a w tym okresie silnik musi korzystać z hybrydowego złącza sygnału mocy, aby osiągnąć tę funkcję napędową. W praktycznym zastosowaniu, wąska i zwarta przestrzeń wewnątrz kończyn psa robota oraz środowisko zastosowań zewnętrznych, wszyscy przedstawili rygorystyczne wymagania dotyczące wtyczki miksującej sygnał mocy, więc jaki rodzaj złącza miksującego sygnał mocy może być kompetentny?
Jakie są wymagania psa-robota dotyczące złączy?
Robot-pies to nowo pojawiający się w ostatnich latach model w branży inteligentnych robotów. Obecnie nasze produkty mają absolutną przewagę pod względem wydajności kosztowej złączy o małej objętości i dużych prądach, dlatego klienci z branży psów-robotów tymczasowo wybierają nasze produkty.
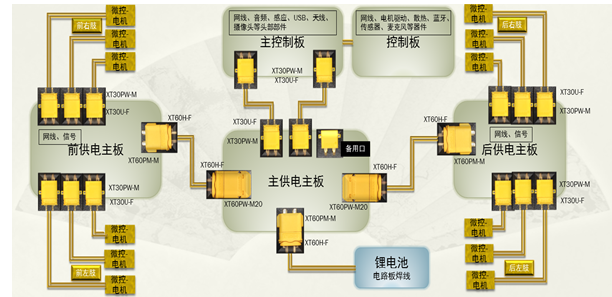
Schemat obwodu hybrydowego złącza sygnału zasilania robota-psa
Obecnie klienci z branży psów robotów oczekują udoskonalenia produktu: produkt powinien być wyposażony w klamrę blokującą, ponieważ salto psa robota i inne czynności wymagają mieszanego złącza sygnału zasilania, aby zapobiec wypadaniu. Obecnie klienci zawsze unikają wypadania złącza w procesie klejenia. Czwarta generacja produktów z serii Amass LC, z klamrą belkową, spełnia potrzeby branży psów-robotów

Analiza najważniejszych wydarzeń serii Amass LC
1, mała objętość, duży prąd, nieograniczony przestrzenią
Do napędzania psa robota do chodzenia po każdej kończynie potrzebne są co najmniej dwa silniki, które zajmują dużo miejsca i pozostawiają niewiele miejsca na złącza. Złącze hybrydowej wtyczki sygnału zasilania serii Amass LC ma minimalną długość mniejszą niż 2 cm i rozmiar złącza wczepowego, co jest odpowiednie dla wąskiej przestrzeni instalacyjnej wewnątrz psa robota.
2, konstrukcja klamry typu belkowego, wkładka jest samoblokująca, nie musisz się martwić o odpadnięcie
W procesie produkcji złączy ważnym ogniwem jest konstrukcja zamka. Gdy złącze jest wystawione na działanie siły zewnętrznej, zamek może wcześniej podzielić większość siły zewnętrznej, aby zapewnić funkcję zapobiegającą wyzwoleniu złącza. Kiedy pies-robot wykonuje salta lub spaceruje po nierównych górskich drogach, wewnętrzne złącze zasilania można łatwo poluzować pod wpływem zewnętrznych wibracji. Klamra typu belkowego złącza mieszanego sygnału mocy serii LC uzupełnia funkcję samoblokowania w momencie włożenia, co bardziej sprzyja korzystaniu z psa-robota w takim środowisku zastosowań!

3, stopień ochrony IP65, można go również swobodnie używać na zewnątrz
Inteligentne psy-roboty nadają się do patrolowania, wykrywania, poszukiwań i ratownictwa, dostaw i innych środowisk zewnętrznych. Jak wszyscy wiemy, środowisko zewnętrzne jest nieprzewidywalne, kurz, deszcz i inne czynniki zewnętrzne łatwo prowadzą do działania inteligentnych psów robotów. Hybrydowa wtyczka sygnału zasilania serii Amass LC osiąga poziom ochrony IP65, skutecznie zapobiegając przedostawaniu się wody i kurzu, aby zapewnić normalne działanie psów-robotów na zewnątrz.
Oprócz powyższych zalet i cech, seria LC ma również odporność na wysoką temperaturę, odporność na niskie temperatury, ognioodporność V0 i inne zalety, odpowiednie dla różnych inteligentnych urządzeń mobilnych w środku!
Czas publikacji: 16 listopada 2022 r